hermanhum
Posts: 2209
Joined: 9/21/2005
Status: offline

|
I have been monkeying around with the situation reported by Aerohead and think that there might be some useful results.
Currently, the sensor on the Penguin missiles have a range of 5nm and sensitivity rating of -650.
Please correct me if I am wrong, but in H3.6.3, the range of the sensors was immaterial since the only pertinent value was the sensitivity. Also, in 3.6.3, when a weapon was launched, the sensor on the weapon would not activate until it reached the 'activation point'.
Can you confirm that in ANW:
1) The weapon sensor is active throughout its flight?
2) Sensor range value actually limits the sensor?
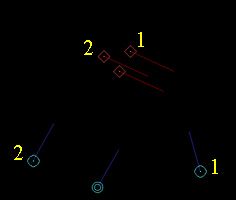
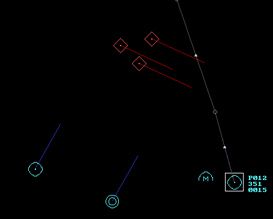
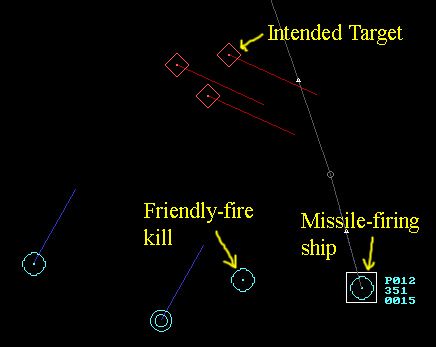
I thought that the sensor was the problem because I had a hunch that once it was fired, it could not see its given target (15nm away). Since the sensor is 'live' througout its flight, it would track the first target available. Because the Goteborg was the largest vessel around, it was the most likely candidate.
So, I played around with the Sensor values for the ANWDb. I increased it to -2650. Now, instead of tracking the Goteborg, the missiles would kill the other Hugin boats.
I then changed the Range value to 25nm and the sensitivity value to -22650 and the things now work just fine. I don't know what the best values might be, but I think that this methodology leads to a better solution since there is no datalinkage back to the launching ship. Also, this might help for those missiles that can be fired BOL. With a datalinkage on a weapon, it is IMPOSSIBLE for that weapon to ever strike a friendly unit. In the modern age of warfare, the LACK of blue-on-blue would be unrealistic, IMO.
I hope that these observations help in your decision.
< Message edited by hermanhum -- 6/22/2006 7:16:14 AM >
_____________________________
|
 Printable Version
Printable Version
 Question about missile behavior in "Dawn Patrol&qu... -
Question about missile behavior in "Dawn Patrol&qu... - 










 New Messages
New Messages No New Messages
No New Messages Hot Topic w/ New Messages
Hot Topic w/ New Messages Hot Topic w/o New Messages
Hot Topic w/o New Messages Locked w/ New Messages
Locked w/ New Messages Locked w/o New Messages
Locked w/o New Messages Post New Thread
Post New Thread